فهرست مطالب:
- مرحله 1: مواد مورد استفاده
- مرحله 2: نحوه راه اندازی بازوی روباتیک
- مرحله 3: کدگذاری
- مرحله 4: برنامه تلفن

تصویری: بازوی ربات آموزشی قابل کنترل از طریق بلوتوث به آردوینو: 4 مرحله

2024 نویسنده: John Day | [email protected]. آخرین اصلاح شده: 2024-01-30 08:57

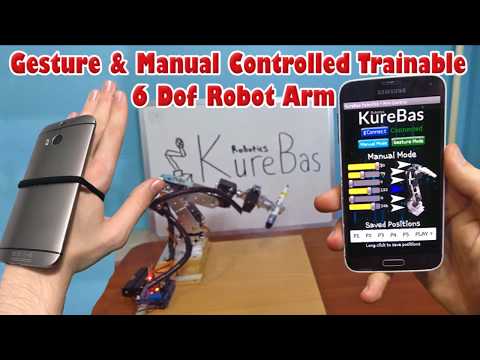
دو حالت در بازو وجود دارد.
اول حالت دستی است که می توانید با حرکت دادن لغزنده ها در برنامه ، بازو را با بلوتوث در تلفن همراه خود حرکت دهید. در عین حال ، می توانید موقعیت های خود را ذخیره کرده و بازی کنید…
دوم حالت حرکت است که از سنسور جهت گیری و سنسور مجاورت تلفن شما استفاده می کند. وقتی برنامه تغییر می کند ، دستوراتی را به arduino ارسال می کند…
KureBasArm - این یک گام دیگر برای ربات جدید KureBas v 3.0 است
مرحله 1: مواد مورد استفاده

ست بازوی رباتیک 6 DOF 35 دلار
6 برابر MG996r فلز سرو 30 دلار
16 کانال Servo Shield 9 دلار
ماژول بلوتوث HC-06 2.50 دلار
2 باتری 18650 لیتیوم یون 11.50 دلار
2x 18650 دارنده باتری 2 دلار
هزینه کل: 90 دلار
مرحله 2: نحوه راه اندازی بازوی روباتیک


مرحله 3: کدگذاری


می توانید همه فایل ها را در این پیوند (کد و برنامه) وارد کنید
drive.google.com/open؟id=1JejPVpk6yYxPe6gNJJ5ALI4ptvwR07aD
مرحله 4: برنامه تلفن

من این برنامه را از MIT APP مخترع 2 تهیه کردم
توصیه شده:
رباتیک DIY - بازوی ربات آموزشی 6 محور: 6 مرحله (همراه با تصاویر)
")
رباتیک DIY | بازوی ربات آموزشی 6 محور: سلول آموزشی DIY-Robotics بستری است که شامل بازوی رباتیک 6 محوره ، مدار کنترل الکترونیکی و نرم افزار برنامه نویسی است. این پلتفرم مقدمه ای برای دنیای رباتیک صنعتی است. از طریق این پروژه ، DIY-Robotics آرزو می کند
چگونه می توان بازوی ربات 4dof با قدرت بالا را با کنترل از راه دور Arduino و Ps2 کنترل کرد؟: 4 مرحله

چگونه می توان بازوی ربات اندازه بزرگ 4dof با کنترل از راه دور Arduino و Ps2 را کنترل کرد؟: این کیت از موتور قدرتمند mg996 استفاده می کند ، به جریان زیاد نیاز دارد ، ما مقدار زیادی ورودی قدرت را آزمایش کرده ایم. فقط آداپتور 5v 6a کار می کند. و تخته آردوینو روی بازوی ربات 6dof نیز کار کنید. پایان: بنویسید خرید SINONING یک فروشگاه برای اسباب بازی DIY
ربات آردوینو با فاصله ، جهت و درجه چرخش (شرق ، غرب ، شمال ، جنوب) کنترل صدا با استفاده از ماژول بلوتوث و حرکت ربات خودکار: 6 مرحله
 کنترل صدا با استفاده از ماژول بلوتوث و حرکت ربات خودکار: 6 مرحله")
ربات آردوینو با فاصله ، جهت و درجه چرخش (شرق ، غرب ، شمال ، جنوب) کنترل صدا با استفاده از ماژول بلوتوث و حرکت ربات خودکار: این دستورالعمل نحوه ساخت ربات آردوینو را که می تواند در جهت مورد نیاز حرکت کند (جلو ، عقب) توضیح می دهد. ، چپ ، راست ، شرق ، غرب ، شمال ، جنوب) با استفاده از فرمان صوتی فاصله در سانتیمتر لازم است. همچنین می توان ربات را به صورت خودکار جابجا کرد
ربات بازوی مکانیکی 4 DOF کنترل شده توسط آردوینو: 6 مرحله

4 DOF Mechanical Arm Robot کنترل شده توسط آردوینو: اخیراً این مجموعه را در aliexpress خریدم ، اما نتوانستم دستورالعملی را پیدا کنم که مناسب این مدل باشد. بنابراین به پایان می رسد که تقریباً دو بار آن را بسازیم و آزمایش های زیادی را انجام دهیم تا زوایای مناسب سروو را پیدا کنیم. مستندات منطقی او است
نحوه مونتاژ یک بازوی روبات چوبی قابل توجه (قسمت 3: بازوی روبات) - بر اساس میکرو: BITN: 8 مرحله
 - بر اساس میکرو: BITN: 8 مرحله")
نحوه مونتاژ یک بازوی روبات چوبی قابل توجه (قسمت 3: ROBOT ARM) - بر اساس میکرو: BITN: مراحل بعدی نصب بر اساس تکمیل حالت جلوگیری از مانع است. فرآیند نصب در قسمت قبل مشابه مراحل نصب در حالت ردیابی خط است. سپس اجازه دهید نگاهی به شکل نهایی A