فهرست مطالب:
- مرحله 1: جمع آوری اجزاء
- مرحله 2: ساخت تخته هزارتوی
- مرحله 3: راه اندازی مدار
- مرحله 4: ساختن برنامه
- مرحله 5: نوشتن کد آردوینو
")
تصویری: Android + Arduino Labyrith Game: 5 مرحله (همراه با تصاویر)
")
2024 نویسنده: John Day | [email protected]. آخرین اصلاح شده: 2024-01-30 08:54



سلام بچه ها..
آیا تا به حال سرگردان بوده اید که یک تخته هزارتوی بسازید که بتوان آن را از طریق تلفن هوشمند اندرویدی خود کنترل کرد …!
خوب شما در جای مناسب هستید. من با استفاده از آردوینو و اندروید یکی را برای خودم ساختم.
نگران نباشید ، کار ساده ای است ، در این پروژه نحوه ساختن را به شما نشان خواهم داد.
1. تخته دخمه پرپیچ و خم (من آن را از جعبه های چوبی قدیمی ساخته شده در اطراف ساخته شده است).
2. برنامه اندروید در برنامه مخترع برای کنترل برد.
3. نوشتن برنامه در آردوینو برای کنترل برد و
4. راه اندازی مدار….
بعداً می توانید از مفهوم آموخته شده در پروژه های دیگر که خواهید ساخت استفاده کنید.
بنابراین بدون اتلاف وقت دیگر ، بیایید شروع کنیم….!
مرحله 1: جمع آوری اجزاء



برای این پروژه به موارد زیر نیاز دارید:
1. دو موتور سروو (من از موتورهای کوچک استفاده کردم و آنها برای من کار کردند).
2. آردوینو Uno
3. ماژول بلوتوث.
4. یک تخته نان.
5. چند سیم جامپر
6. تخته های چوبی نازک یا سخت
7. میخ ، برخی از میله های کلید از صفحه کلیدهای قدیمی
8. ترموکول (پلی استایرن)
مرحله 2: ساخت تخته هزارتوی



این قسمت مکانیکی پروژه است..
ابتدا برای پایه یک تکه مستطیل بلند از چوب یا مقوا ببرید. باید بزرگتر از تخته کج واقعی باشد..
دو اندازه مساوی از چوب مکعبی را برش دهید..
و یک میخ به هر کدام اضافه کنید ، به گونه ای که از پایه در یک ارتفاع باشند. همچنین مقداری چوب اضافی را برش بزنید تا به ستون ها اضافه شود.
حالا برای تابلوی بالا..
یک قاب کوچکتر از پایه بسازید ، این محور x ما خواهد بود ، در قسمت بیرونی لبه های کوچکتر قاب دقیقاً در مرکز لبه ها سوراخ های کوچکی ایجاد می کنیم. میله ها را از وسط نصف کرده و به لبه های بزرگ قاب رو به داخل بچسبانید. قبل از انجام این کار آنها را به نصف برسانید.
این صفحه را روی قاب نگه می دارد و به چرخش کمک می کند.
حالا ستون ها را به سوراخ های بیرونی اضافه کنید تا قاب روی پایه بایستد.
ستون ها را به پایه بچسبانید و همچنین تکیه گاه ها را به آنها وصل کنید.
حالا موتورهای سروو را اضافه کنید.
یکی به پایه متصل می شود و با استفاده از یک میله کوچک به قاب وصل می شود تا قاب را بچرخاند
دیگری به قاب وصل می شود و با استفاده از یک میله کوچک به صفحه بالا متصل می شود تا تخته بالا را بچرخاند.
سرووها باید همانطور که در عکسها نشان داده شده است عمود بر یکدیگر نصب شوند.
در حال حاضر هیئت مدیره آماده است.
من با استفاده از ترموکول و یک تخته کارت پیچ و خم را ایجاد کردم.
مرحله 3: راه اندازی مدار

مدار را مطابق تصویر تنظیم کنید…
به یاد داشته باشید برای سروها من از سیم قرمز استفاده می کنم مثبت است ، قهوه ای منفی است و نارنجی سیگنال است.
ماژول بلوتوث
Rx به پین 1 می رود
Tx به پین 0 می رود
سیم سیگنال سروو پایه به پین 5 می رود
سیم سیگنال سروو قاب به پین 6 می رود
به خاطر داشته باشید که منبع تغذیه اضافی را برای ماژول سروو و بلوتوث اضافه کنید.
مرحله 4: ساختن برنامه

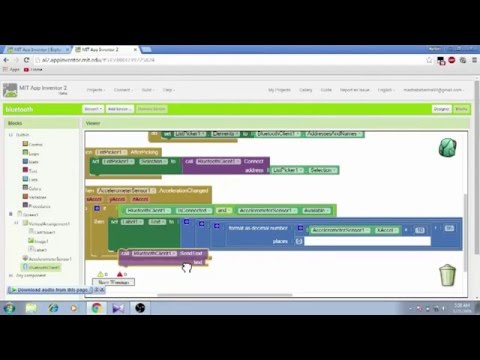

خوب قبل از هر چیز برای ایجاد هرگونه برنامه باید به mit mit inventor وارد شوید..
به https://appinventor.mit.edu/explore/ بروید
و روی ایجاد برنامه کلیک کنید! که در گوشه سمت راست بالا ، ثبت نام کنید و آماده رفتن هستید….
همه چیز دیگری که در ویدیو نشان داده ام.. نگاه کنید.
در اینجا اساسی:
هنگامی که صفحه در برنامه اولیه می شود (که در این مورد Screen1 است) ،
سنسور شتاب سنج فعال است و حساسیت روی حداکثر یعنی 3 تنظیم شده است.
اکنون وقتی فهرست انتخاب کننده را فشار می دهیم
-یک لیست ظاهر می شود ، دستگاههای جفت شده را لیست می کند.
(قبل از باز کردن برنامه باید ماژول را جفت کنید ، به طور معمول کد جفت 1234 است)
حالا قبل از انتخاب فهرست انتخاب ،
لیست را با دستگاه های مرتبط و آدرس آنها تنظیم کنید
پس از انتخاب دستگاه
-آداپتور بلوتوث با دستگاه انتخاب شده متصل می شود
اکنون ماژول متصل است
حالا وقتی داده های حسگر شتاب سنج تغییر می کند
-داده ها را به متن برچسب اضافه کنید و با ارسال بلوتوث ارسال کنید.
در حال حاضر قسمت مشکل ارسال دو داده در یک زمان است
داده های # شتاب سنج از 0 تا 9.5 در حالت کج به چپ و 0 تا -9.5 در هنگام کج به راست متغیر است.
وقتی تلفن به قسمت بالا و بالا کج می شود ، همینطور است.
بنابراین ما داده های کج محور x و y را داریم که باید ارسال کنیم…
اجازه دهید داده های محور x X و Y محور Y باشد
بنابراین آنچه من انجام دادم این است:
Text = "(X*10 (حذف اعشار پس از آن) +95)*1000 (ضرب در 1000)+Y*10 (حذف اعشاری) +95"
بنابراین داده ها از 0 تا 190 برای هر محور متغیر است و به 190180 اضافه می شود که 3 رقم اول x محور و 3 مورد آخر مختصات محور y است …
که به ماژول بلوتوث ارسال می شود و با زوایای چرخش سروو در کد آردوینو به داده ها و نقشه واقعی تقسیم می شود…
مرحله 5: نوشتن کد آردوینو


پس از اتمام برنامه ، اجازه دهید کد را بارگذاری کنم ، آن را بارگیری کنید ، کامپایل کنید و به آردوینو ارسال کنید ، اما منتظر بمانید تا کد را ارسال کنید ، پین های rx و tx ماژول bluettoh را از برد آردوینو جدا کرده و کد را ارسال کنید. پس از این می توانید پین ها را به عقب وصل کنید..
کدی که از بلوتوث دریافت می شود یک رشته است که دارای داده های محور ما است.
در حال حاضر Serial.parseInt ()؛ برای خواندن رشته و تبدیل رشته به int در یک متغیر pos استفاده می شود.
در حال حاضر pos دارای ارزش = 190180 است (بگو) هدف ما در حال حاضر رمزگشایی داده ها است ، یعنی حذف محور x و مختصات y
برای محور x مقدار را بر 1000 تقسیم کنید ، این مقدار 190. یعنی ارزش/1000 = 190 را نشان می دهد
و برای محور y ماژولار مقدار را بر 1000 تقسیم می کند ، که به ما 180 یعنی مقدار٪ 1000 = 180 می دهد
اکنون حداکثر و حداقل موقعیت سروهایی را که برای کج شدن صفحه می خواهید محاسبه کنید … در مورد من 180 و 75 آن و….
اکنون محور x و y را هماهنگ کرده ایم ، اکنون فقط باید مختصات را با حداقل و حداکثر زاویه چرخشی که برای سرویس های خود می خواهیم ترسیم کنیم.
برای جزئیات کد را مشاهده کنید
و کار ما تمام شد … کد را بارگذاری کنید ، برنامه را باز کنید و بازی کنید….
آیا می دانید google برای خود ساخته است و هزارتوی بسیار بزرگی است که تا به حال دیده اید … که همچنین انگیزه من برای ساختن آن برای خودم است.
پس تا دفعه بعد خوش بگذره..
توصیه شده:
DIY Arduino Tic Toc Toe Game: 6 مرحله (همراه با تصاویر)
")
DIY Arduino Tic Toc Toe Game: بازی Tic Tac Toe یک بازی کلاسیک دو نفره است. وقتی با بچه ها ، خانواده و دوستان خود بازی می کنید ، سرگرم کننده می شود. در اینجا نحوه ساخت بازی Tic Tac Toe با استفاده از Arduino Uno ، دکمه های فشار و LED های پیکسل را نشان داده ام. این آردوینو بر اساس انگشت 4 در 4 تیک تاک
Crack the Code Game، Arduino مبتنی بر جعبه پازل: 4 مرحله (همراه با تصاویر)
")
Crack the Code Game، Arduino مبتنی بر پازل جعبه: در این دستورالعمل ، من به شما نشان خواهم داد که چگونه می توانید بازی کد را که در آن از یک شماره گیر رمزگذار چرخشی استفاده می کنید تا کد تصادفی ایجاد شده را به گاوصندوق بسازید ، ایجاد کنید. 8 LED در جلوی گاوصندوق وجود دارد که به شما می گوید تعداد
تطبیق یک گوشی تلفن همراه با تلفن همراه: 7 مرحله (همراه با تصاویر)
")
انطباق یک گوشی تلفن همراه با یک تلفن همراه: توسط بیل ریو ([email protected]) اقتباس شده برای دستورالعمل ها توسط موس ([email protected]) سلب مسئولیت: روش شرح داده شده در اینجا ممکن است برای شما کارساز نباشد گرفتن. اگر کار نمی کند ، یا اگر چیزی را خراب می کنید ، m نیست
Arduino RFID Maze Game: 6 مرحله (همراه با تصاویر)
")
بازی Arduino RFID Maze: امروز من نشان خواهم داد که چگونه یک بازی کوچک پیچ و خم RFID را برای Arduino جمع آوری کرده ام. کد و فایلهای چاپ سه بعدی گنجانده شده است ، بنابراین با خیال راحت مراحل زیر را انجام دهید! من می خواستم یک اسباب بازی برای کودکان بسازم که به صورت مجازی ترکیب شود
Arduino LED Rocker Game !: 4 مرحله (همراه با تصاویر)
")
Arduino LED Rocker Game!: این یک بازی آردوینو ساده است ، بسیار ابتدایی اما اعتیادآور. این بر اساس چشمک زدن بدون مثال تاخیر وب سایت Arduino است. برای پخش ، فقط Serial Monitor را باز کنید و وقتی LED وسط روشن شد دکمه را فشار دهید. سه جان می گیری