فهرست مطالب:
- مرحله 1: بخش چاپ و مونتاژ
- مرحله 2: پایگاه جدید
- مرحله 3: کمی اصلاح کنید
- مرحله 4: PCB خانگی
- مرحله 5: حک کردن PCB
- مرحله 6: فرز PCB
- مرحله 7: فرز PCB: دریافت فایل برای تولید
- مرحله 8: فرز PCB: فرآیند فرز
- مرحله 9: فرز PCB: محل کار را تمیز کنید
- مرحله 10: لحیم کردن قطعه
- مرحله 11: سیستم عامل و نرم افزار
- مرحله 12: آزمایش
- مرحله 13: مونتاژ را ادامه دهید
- مرحله 14: کالیبراسیون
- مرحله 15: اولین آزمون ماندارین
- مرحله 16: با تشکر
")
تصویری: Ciclop 3D Scanner My Way گام به گام: 16 مرحله (همراه با تصاویر)
")
2024 نویسنده: John Day | [email protected]. آخرین اصلاح شده: 2024-01-30 08:56


سلام به همه،
من قصد دارم اسکنر معروف Ciclop 3D را درک کنم.
تمام مراحل که به خوبی در پروژه اصلی توضیح داده شده است ، وجود ندارد.
من برای ساده کردن فرآیند ، برخی از راهکارها را انجام دادم ، ابتدا پایه را چاپ می کنم و سپس PCB را دوباره تنظیم می کنم ، اما ادامه دهید.
مرحله 1: بخش چاپ و مونتاژ
برای بخش مونتاژ بهترین راه حل مراجعه به سند اصلی است
www.bq.com/it/support/ciclop/support-sheet
به صورت چند زبانه و به خوبی توضیح داده شده است.
مونتاژ قسمت چاپ شده بسیار ساده است.
فیلم های زیادی نیز وجود دارد ، یکی از آنها رسمی است.
مرحله 2: پایگاه جدید


تنها قطعه ای که پیدا کردن آن دشوار است ، پایه پلکسی گلاس است ، بنابراین من یک چاپگر را با چاپگر 3 بعدی Anet A8 طراحی می کنم.
می توانید پروژه را در اینجا پیدا کنید.
مرحله 3: کمی اصلاح کنید


مشکل دیگر این است که احتمالاً می توانید لیزر کم هزینه ای پیدا کنید که روی نگهدارنده اصلی مناسب نباشد.
لیزر رایج لیزر 12 میلی متری است.
بنابراین می توانید از این نوع چاپ شده استفاده کنید.
مشکل دیگر این است که قسمت چرخشی را متوقف کنید ، من فکر می کنم راه حل بهتر استفاده از نوار لاستیکی است ، همانطور که در تصاویر مشاهده می کنید.
مرحله 4: PCB خانگی

برای این پروژه ، من یک PCB را کاملاً سازگار با اسکن اصلی Zum پیچیده تر کردم ، اما از تمام ویژگی های اضافی استفاده نشده است.
نسخه من برای آردوینو نانو است ، بنابراین کمی بیشتر از نسخه اصلی است.
اگر مهارت لازم برای تولید خودکار PCB را ندارید ، می توانید از فایل gerber استفاده کنید که می توانید در مقاله برای ارسال به کارخانه تولید کننده PCB مانند https://www.pcbgogo.com/ ارسال کنید
مرحله 5: حک کردن PCB
من هرگز از این تکنیک استفاده نکردم ، اما فایل svg یا PDF را برای تولید به این مرحله اضافه می کنم.
مرحله 6: فرز PCB
من از این تکنیک برای تولید شخصی خود استفاده می کنم ، در این مورد 2 مقاله می نویسم:
اولین مورد یک راهنمای گام به گام برای ایجاد یک CNC قابل حمل مناسب و بهینه شده برای فرز CNC است.
در اینجا راهنمای.
نسبت به راهنمای قبلی که گام به گام نحوه استفاده از دستگاه ، نحوه ایجاد PCB و نحوه ایجاد فایل برای تولید را توضیح می دهد.
در اینجا راهنمای دیگر است.
مرحله 7: فرز PCB: دریافت فایل برای تولید
من فایل تولید ، gerber یا مستقیماً gcode دستگاه فرز را در اینجا اضافه می کنم
مرحله 8: فرز PCB: فرآیند فرز



ابتدا ته مسی را آسیاب کنید ، سپس سوراخ را سوراخ کنید.
مرحله 9: فرز PCB: محل کار را تمیز کنید


از کاغذ شن برای تخت و تمیز کردن تخته استفاده کنید.
مرحله 10: لحیم کردن قطعه



برای این تخته از موارد زیر استفاده می کنم:
- آردوینو نانو
- درایور A4988 Stepper
- مقاومت 2x 1k
- مقاومت 1x 10k
- ترانزیستور 2x2n2222
- 5.5 بشکه برای ولتاژ ورودی
من از منبع تغذیه 12v 2A (به بشکه) برای تغذیه راننده استپر استفاده می کنم.
بیش از اتصال USB برای لیزر و آردوینو کافی است.
مرحله 11: سیستم عامل و نرم افزار

می توانید سیستم عامل را برای بارگیری در Arduino از اینجا بارگیری کنید
github.com/bqlabs/horus-fw
همانطور که در راهنما توضیح داده شد ، دوربین وب کم Logitech C270 HD است ، درایور آن اینجاست.
support.logitech.com/fa_ca/product/hd-webca…
در اینجا می توانید نرم افزار پیدا کنید.
horus.readthedocs.io/fa/release-0.2/
اگر برای بارگیری مشکل دارید می توانید به اینجا بروید
github.com/LibreScanner/horus/releases
مرحله 12: آزمایش

ابتدا همه را بدون دوربین آزمایش می کنم و خوب کار می کند.
برای بررسی لیزر و استپر می توانید از فایل ino استفاده کنید
مرحله 13: مونتاژ را ادامه دهید


سپس دوربین را اضافه می کنم ، تخته را ثابت می کنم و کاغذ مشکی را در بالای سکو قرار می دهم.
مرحله 14: کالیبراسیون
فیلمهای زیادی در مورد کالیبراسیون وجود دارد ، این مرحله بسیار ساده است.
من این ویدیوی حداقلی را با Ciclop جدیدم متوجه می شوم.
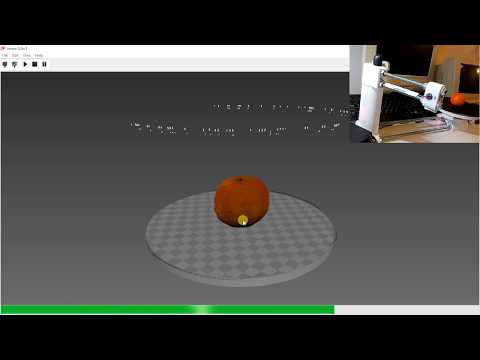
مرحله 15: اولین آزمون ماندارین
در این ویدئو من فقط شی را اسکن می کنم ، اما برای داشتن یک تصویر خوب باید با نرم افزاری مانند MeshLab پردازش پست را انجام دهید.
مرحله 16: با تشکر
حالا شروع به اسکن همه کنید.
توصیه شده:
موتورسیکلت هوشمند HUD نمونه اولیه (ناوبری گام به گام و موارد دیگر): 9 مرحله
: 9 مرحله")
Smart Motorcycle HUD Prototype (ناوبری به نوبه خود و موارد دیگر): سلام! این دستورالعمل داستان نحوه طراحی و ساخت یک پلت فرم HUD (Heads-Up Display) است که برای نصب روی کلاه ایمنی موتورسیکلت طراحی شده است. در زمینه مسابقه & quot؛ نقشه ها & quot؛ نوشته شده است. متأسفانه ، من نتوانستم این کار را به طور کامل به پایان برسانم
سیستم هشدار پارک معکوس خودرو آردوینو - گام به گام: 4 مرحله

سیستم هشدار پارک معکوس خودرو آردوینو | گام به گام: در این پروژه ، من یک مدار ساده سنسور پارک معکوس اتومبیل آردوینو را با استفاده از سنسور اولتراسونیک Arduino UNO و HC-SR04 طراحی می کنم. این سیستم هشدار معکوس اتومبیل مبتنی بر آردوینو می تواند برای ناوبری خودکار ، ربات رنج و سایر محدوده های دوربرد استفاده شود
آموزش گام به گام در رباتیک با کیت: 6 مرحله

آموزش گام به گام در زمینه رباتیک با یک کیت: پس از چند ماه ساخت ربات خودم (لطفاً به همه این موارد مراجعه کنید) ، و پس از خرابی قطعات دوبار ، تصمیم گرفتم یک قدم به عقب بردارم و دوباره فکر کنم استراتژی و جهت. تجربه چند ماهه گاهی اوقات بسیار سودمند بود و
گام به گام آردیشن آکوستیک با آردوینو اونو (8 مرحله ای): 8 مرحله
: 8 مرحله")
آکوستیک Levitation با Arduino Uno گام به گام (8 مرحله ای): مبدل های صوتی اولتراسونیک منبع تغذیه آداپتور زن L298N Dc با پین dc مرد Arduino UNOBreadboard نحوه کار: ابتدا کد را در Arduino Uno بارگذاری می کنید (این یک میکروکنترلر مجهز به دیجیتال است) و پورت های آنالوگ برای تبدیل کد (C ++)
ربات ردیابی RC با استفاده از آردوینو - گام به گام: 3 مرحله

RC ربات ردیابی شده با استفاده از آردوینو - گام به گام: سلام بچه ها ، من با یک شاسی جالب دیگر Robot از BangGood برگشتم. امیدوارم پروژه های قبلی ما را پشت سر گذاشته باشید - Spinel Crux V1 - The Gesture Controlled Robot ، Spinel Crux L2 - Arduino Pick and Place Robot with Robotic Arms و The Badland Braw