فهرست مطالب:
- تدارکات
- مرحله 1: تنظیمات چاپگر سه بعدی
- مرحله 2: Otto DIY+ خود را بسازید
- مرحله 3: Otto خود را کدگذاری کنید
- مرحله 4: کد اصلی برنامه Bluetooth
- مرحله 5: کپی ، گسترش ، سفارشی سازی ، اصلاح ، ریمیکس و اشتراک گذاری
- مرحله 6: راه اندازی بلوتوث (BT) (فقط در صورت عدم موفقیت جفت شدن):
")
تصویری: ربات بلوتوث اتو DIY+ آردوینو چاپ سه بعدی آسان: 6 مرحله (همراه با تصاویر)
")
2024 نویسنده: John Day | [email protected]. آخرین اصلاح شده: 2024-01-30 08:52




واقعاً منبع باز Otto به آموزش STEAM باز اجازه می دهد ، ما بازخورد کارگاه ها و مدارس مختلف در سراسر جهان را که قبلاً از Otto DIY در کلاس درس خود استفاده می کنند ، جمع آوری می کنیم و بسته به باز بودن این مکان های آموزشی ، ما مطالب درس را سازماندهی و به اشتراک می گذاریم.
مجوز CC-BY-SA Creative Commons به این معنی است که می توانید به صورت رایگان کپی کنید ، اما باید با قرار دادن وب سایت ما به اعتبار اصلی (https://www.ottodiy.com/)
Otto DIY + نسخه بهبود یافته و پیشرفته #OttoDIY اصلی است ، ایده این است که ویژگی های اصلی مشابهی داشته باشید ربات DIY + کنترل و برنامه نویسی بلوتوث + موتورهای سروو دنده فلزی + قابل شارژ + تغییر حالتها با حسگر لمسی + حسگر صدا + حرکت نور + خروجی های دیگر +…؟
بخش هیجان انگیز این است که ما در حال توسعه آشکار با سازندگان و هکرها در سراسر جهان هستیم ، بنابراین ما آماده ایده هستیم ، نه تنها از متخصصان می توانید با ما همراه باشید ، بازخورد ، اشتراک اجتماعی ، آزمایش یا هر گونه مشارکت دیگری که به نظر شما می رسد.
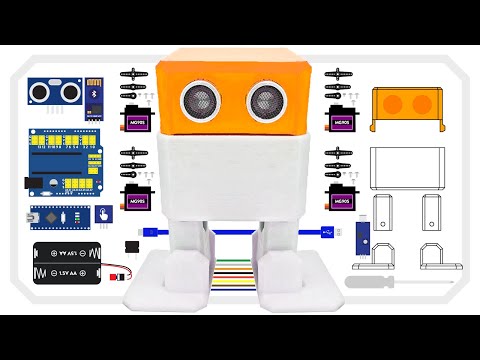
تدارکات
1 ، آردوینو نانو
1 × HC-06 یا HC-05 ماژول بلوتوث
1 ، Arduino Nano Shield I/O ؛ شما می توانید از یک تخته نان کوچک استفاده کنید اما کابل بیشتر کار کنید
1 × کابل USB-A به Mini-USB
4 × میکرو سرو MG90s (فلزی)
1 ، زنگ
10 ، سیم جهنده زن/زن
1 ، سنسور لمسی
سنسور صدا 1
میکرو سوئیچ 1 × 8 8 8 میلی متر خودکار قفل روشن/خاموش
1 × 3.7 V LiPo باتری با تقویت کننده تا 5V (اختیاری) 1 × پیچ گوشتی فیلیپس 1 x چاپگر سه بعدی (یا از سرویس یا دوست خود استفاده کنید ؛))
مرحله 1: تنظیمات چاپگر سه بعدی

برای آشنایی با اصول اولیه ساخت ربات دوپا ، مهم است که ابتدا Otto DIY را بخوانید. با مراجعه به اینجا https://wikifactory.com/+OttoDIY/otto-diy- همه قطعات ، کدها و کتابخانه های STL چاپ سه بعدی را برای بلوتوث دریافت کنید. بعلاوه در برگه پرونده ها
- استفاده از چاپگر FDM 3D با مواد PLA را توصیه کنید.
- اصلاً نیازی به پشتیبانی یا قایق نیست.
- رزولوشن: 0.15 میلی متر
- چگالی پر شدن 20٪
نیاز به تنظیم اندازه برخی تغییرات با استفاده از فایل منبع ایجاد شده در Autodesk Fusion 360 است
یا Tinkercad اینجا
مرحله 2: Otto DIY+ خود را بسازید



در ویدیو و تصاویر زیر می توانید مرجعی از نحوه ساخت Otto DIY+، به دلیل نسخه های جدید طراحی ربات ، داشته باشید.
مرحله 3: Otto خود را کدگذاری کنید





بنابراین تا اینجا شما باید یک Otto 3D چاپ ، مونتاژ ، و در حال حاضر برنامه نویسی برای نصب کتابخانه ها و Arduino در رایانه خود داشته باشید.
ساده ترین روش برای کدگذاری Otto خود استفاده از نرم افزار Blockly است ، برنامه نویس پیشرفته تر می تواند Arduino IDE را مستقیماً امتحان کند.
مرحله 4: کد اصلی برنامه Bluetooth




اتو باید آماده دریافت فرمان از طریق بلوتوث باشد و برای این کار باید کد اصلی را در مغز خود قرار دهد
- کتابخانه های Otto را در پوشه Arduino IDE کپی کنید
- بارگذاری برنامه.ino طرح در Otto
- برنامه را در تلفن هوشمند خود بارگیری و نصب کنید. فروشگاه Google Play (https://play.google.com/store/apps/details؟id=com.ottodiy)
- اکنون می توانید ماژول را متصل کرده و بلوتوث را در تلفن خود فعال کنید.
- Otto را پیدا کرده و آدرس /نام بلوتوث را جفت کنید
- اکنون می توانید از APP برای کنترل Otto استفاده کنید!
- با ویژگی های جدید بازی کنید و اگر لازم نیست ممکن است نیاز به تنظیم مجدد BT خود داشته باشید اما نگران نباشید نیز آسان است؛)
مرحله 5: کپی ، گسترش ، سفارشی سازی ، اصلاح ، ریمیکس و اشتراک گذاری




این پست وبلاگ را بررسی کنید تا ایده هایی درباره نحوه شخصی سازی ربات خود پیدا کنید
به انجمن Otto Builder بپیوندید! ما را دنبال کنید ، لایک ما را به اشتراک بگذارید و خلاقیت خود را به اشتراک بگذارید ، می توانید با به اشتراک گذاشتن ربات خود در هر رسانه اجتماعی در اینجا برجسته شوید.
فیس بوک و اینستاگرام
از هشتگ #ottodiy در پست خود استفاده کنید وOttoDIY را تگ کنید یا ذکر کنید
بخشی از این جامعه دوستانه سازندگان ، معلمان و سازندگان ربات باشید! با پیوستن به اینجا به انجمن Otto Builder ما خوش آمدید!
مرحله 6: راه اندازی بلوتوث (BT) (فقط در صورت عدم موفقیت جفت شدن):
این راه اندازی فقط برای ماژول هایی که با نرخ استاندارد 9600 همراه نیستند لازم است ، چگونه باید بدانید؟ فقط ابتدا کد و APP را امتحان کنید ، اگر تلفن با Otto جفت نمی شود یا به دستورات پاسخ نمی دهد ، احتمالاً به این معنی است که ماژول شما در نرخ baud متفاوت است بنابراین باید پیکربندی شود
کد BT دارای 115200 baud-rate است بنابراین ماژول BT باید با آن سرعت مطابقت داشته باشد تا بتواند از طریق رابط سریال (UART) با Arduino Nano ارتباط برقرار کند.
برای HC-05: 38400 یا 115200
1. ابتدا طرح HC05_BT_config.ino را در Nano خود بارگذاری کنید ، سپس Nano را از USB جدا کنید.
2. اکنون BT را همانطور که در نمودار نشان داده شده است به Arduino Nano وصل کنید اما VCC را وصل نکنید.
TX - RX
RX - TX
VCC - 5 ولت
GND - GND
3. USB را به نانو وصل کنید و سپس VCC را وصل کنید تا BT وارد حالت AT شود. LED در BT باید تقریباً هر 2 ثانیه یکبار چشمک بزند. (اگر این کار نمی کند ، هنگام اتصال VCC دکمه را روی ماژول BT نگه دارید).
مانیتور سریال را در IDE باز کنید ، نرخ baud را روی 9600 تنظیم کنید و خط به هر دو NL & CR ختم شود.
AT را تایپ کرده و سپس enter را فشار دهید. (اگر همه چیز درست است ، BT باید با OK پاسخ دهد و سپس دستورات زیر را وارد کنید:
AT+NAME = Zowi "تنظیم نام"
AT+PSWD = 1234 "گذرواژه مرتبط کردن"
AT+UART = 115200 ، 1 ، 0 "نرخ باود"
AT+POLAR = 1 ، 0 "که پین STATE را قادر می سازد به عنوان تنظیم مجدد برای برنامه نویسی arduino در BT استفاده شود"
حالا به مرحله APP بروید
در صورت بروز هرگونه مشکلی نحوه تغییر پیش فرض ماژول بلوتوث HC-05 با استفاده از دستورات AT را بررسی کنید
www.instructables.com/id/Modify-The-HC-05-…
برای HC-06: 9600 یا 115200
برای ماژول HC-06 BT همه چیز کمی ساده تر است زیرا ماژول همیشه در حالت فرمان AT است وقتی به هیچ چیزی متصل نیست. اما نکته منفی این است که ماژول HC-06 نمی تواند برای بارگذاری طرح ها در Arduino استفاده شود زیرا تنظیم مجدد نشده است. برای پیکربندی ماژول
1. این طرح HC06_BT_config.ino را در نانو خود بارگذاری کنید
1. USB را قطع کنید
2. ماژول BT را به Arduino Nano وصل کنید:
TX - RX
RX - TX
VCC - 5 ولت
GND - GND
3. نانو را روشن کنید و بعد از حدود 10-15 ثانیه همه چیز باید تمام شود و BT شما پیکربندی شود (LED13 باید شروع به چشمک زدن کند).
اگر مشکلی دارید این دستورالعمل را بررسی کنید
در صورت هر گونه س ،ال ، من از طریق نظرات جدید آموزنده اطلاعیه نمی گیرم ، بنابراین اگر چیزی هست لطفاً در انجمن ما https://builders.ottodiy.com/ ارسال کنید
توصیه شده:
ربات چهارپایه آردوینو چاپ سه بعدی: 13 مرحله (همراه با تصاویر)
")
ربات چهارپایه آردوینو پرینت سه بعدی: از دستورالعمل های قبلی ، احتمالاً می بینید که من علاقه زیادی به پروژه های رباتیک دارم. پس از دستورالعمل قبلی که در آن یک دوپا روباتیک ساختم ، تصمیم گرفتم یک ربات چهارپا بسازم که می تواند از حیواناتی مانند سگ تقلید کند
فرستنده RC مبتنی بر آردوینو چاپ سه بعدی: 25 مرحله (همراه با تصاویر)
")
فرستنده سه بعدی RC مبتنی بر آردوینو: این پروژه به شما نشان می دهد که چگونه در مورد طراحی و ساخت فرستنده RC مبتنی بر آردوینو تصمیم گرفتم. هدف من از این پروژه طراحی یک فرستنده RC قابل چاپ سه بعدی بود که می توانم از آن برای کنترل سایر پروژه های آردوینو استفاده کنم. من می خواستم کنترل کننده باشد
صفحه کلید ماکرو آردوینو چاپ سه بعدی: 6 مرحله (همراه با تصاویر)
")
صفحه کلید ماکرو آردوینو چاپ سه بعدی: این اولین پروژه من بود که با Arduino Pro Micro کار کردم. می توانید از آن در چت های Zoom یا Discord برای انجام کارهایی مانند ضامن نادیده ، تغییر حالت ویدیو یا اشتراک گذاری صفحه استفاده کنید. علاوه بر این ، می توانید آن را طوری برنامه ریزی کنید که برنامه های پرکاربرد را در دستگاه خود باز کند
OAREE - چاپ سه بعدی - جلوگیری از مانع ربات برای آموزش مهندسی (OAREE) با آردوینو: 5 مرحله (همراه با تصاویر)
 با آردوینو: 5 مرحله (همراه با تصاویر)")
OAREE - چاپ سه بعدی - روبات اجتناب از موانع برای آموزش مهندسی (OAREE) با آردوینو: OAREE (مانع جلوگیری از روبات برای آموزش مهندسی) طراحی: هدف از این دستورالعمل طراحی یک ربات OAR (جلوگیری از مانع روبرو) ساده/جمع و جور بود. قابل چاپ سه بعدی ، جمع آوری آسان ، از سرویس های چرخشی پیوسته برای حرکت استفاده می کند
[ربات آردوینو] چگونه می توان یک ربات ضبط حرکتی ساخت - ربات انگشت شست - سرو موتور - کد منبع: 26 مرحله (همراه با تصاویر)
![[ربات آردوینو] چگونه می توان یک ربات ضبط حرکتی ساخت - ربات انگشت شست - سرو موتور - کد منبع: 26 مرحله (همراه با تصاویر)](https://i.howwhatproduce.com/images/001/image-1599-93-j.webp "[ربات آردوینو] چگونه می توان یک ربات ضبط حرکتی ساخت - ربات انگشت شست - سرو موتور - کد منبع: 26 مرحله (همراه با تصاویر)")
[ربات آردوینو] چگونه می توان یک ربات ضبط حرکتی ساخت | ربات انگشت شست | سرو موتور | کد منبع: ربات انگشت شست از پتانسیومتر سروو موتور MG90S استفاده شده است. بسیار سرگرم کننده و آسان است! کد بسیار ساده است. فقط در حدود 30 خط است. به نظر می رسد یک حرکت ضبط است. لطفاً هر گونه سوال یا بازخوردی بگذارید! [دستورالعمل] کد منبع https: //github.c